cmake_policy
Toast
steam
RHCE
vue3组件
STL
Smart Tomcat
对比学习
分布式框架
QScintilla
颜宁
Themida
DDD
finebi
刷盘
API接口管理
ai
斐波那契数列
docker 搭建es
虚拟主播
RADAR
2024/4/14 0:11:15
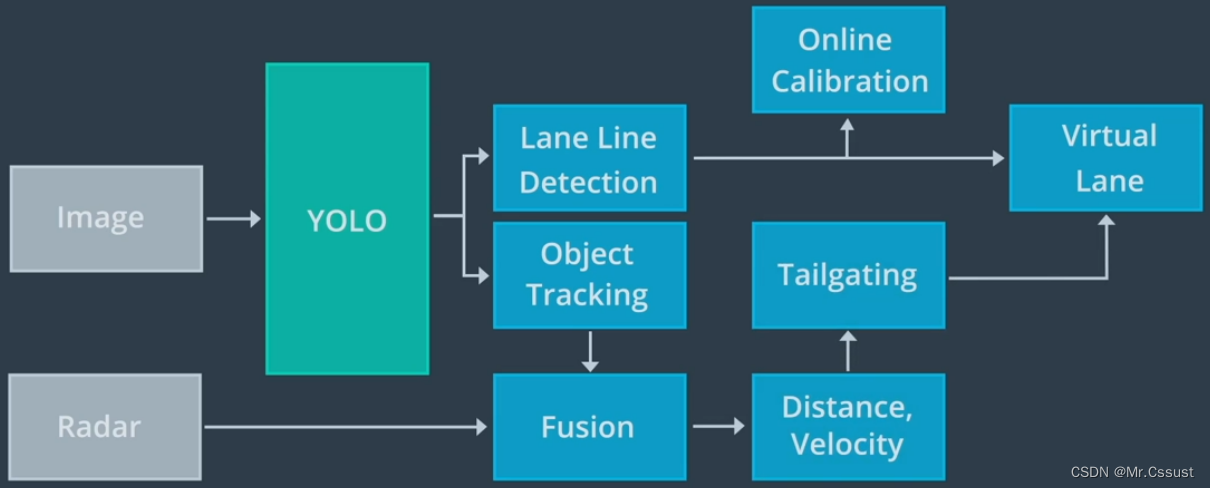
自动驾驶学习笔记(七)——感知融合
#Apollo开发者#
学习课程的传送门如下,当您也准备学习自动驾驶时,可以和我一同前往:
《自动驾驶新人之旅》免费课程—> 传送门
《Apollo Beta宣讲和线下沙龙》免费报名—>传送门 文章目录
前言
感知融合
卡尔曼滤波
融合策略
实…
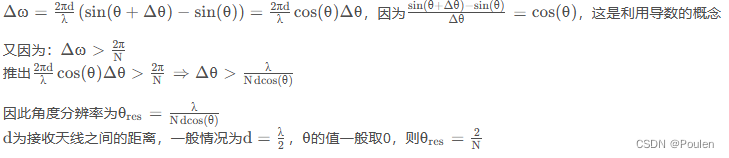
雷达测角原理、测角精度、测角分辨率以及3DFFT角度估计算法汇总
1.角度测量方法
依据:电磁波的直线传播和雷达天线的方向性。
分类:振幅法测角、相位法测角
1.1 相位法测角 相位法测角利用多个天线所接收回波信号之间的相位差进行测角。如下图所示; 图 1 设在θ方向有一远区目标,则到达接收点…


自动驾驶传感器:传感的本质
自动驾驶传感器:传感的本质 附赠自动驾驶学习资料和量产经验:链接
0. 前言
这个系列的背景是:工作时候需要攒一台数据采集车辆,那段时间需要熟悉感知硬件,写了不少笔记,都是些冗长的文章,感兴…
FMCW雷达仿真:基于L形阵列4D点云获取
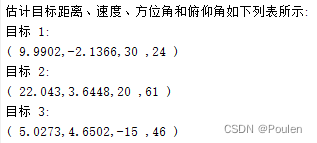
摘要:本期内容为3D点云目标获取的延续工作,在距离、速度、方位角估计的基础上,通过设计L型阵列结构,进一步实现目标俯仰角的估计,最终实现目标4-D点云的获取。首先,通过中频信号建立仿真信号模型࿰…